4.8. 实例-基于容器环境进行开发¶
现在用一个实例将之前学到的 Docker 知识串联起来。该实例为 容器 中运行并开发 VINS Fusion:
1. 准备: 完成 安装 Docker CE、NVIDIA GPU 支持、Docker镜像加速、安装Docker插件、连接容器
2. 下载ROS镜像:
docker pull osrf/ros:melodic-desktop-full # 下载 ros melodic-desktop-full 镜像
3. 构建VINS镜像:
新建文件夹 vins-docker,用 VsCode 打开。在当前工程目录下新建一个文件 Dockerfile,在 Dockerfile 中写入如下内容:
# 基础镜像为 ROS 镜像
FROM osrf/ros:melodic-desktop-full
# 修改 Ubuntu源 和 ROS源 为清华源
RUN sed -i "s|http://.*ubuntu.com|http://mirrors.tuna.tsinghua.edu.cn|g" /etc/apt/sources.list && \
sed -i "s|packages.ros.org|mirrors.tuna.tsinghua.edu.cn|g" /etc/apt/sources.list.d/ros1-latest.list
# 安装 ceres
RUN apt-get update && apt-get install -y libgoogle-glog-dev \
libatlas-base-dev \
libsuitesparse-dev \
python-catkin-tools \
wget \
&& rm -rf /var/lib/apt/lists/* \
&& wget http://ceres-solver.org/ceres-solver-1.14.0.tar.gz && tar -xzvf ceres-solver-1.14.0.tar.gz \
&& cd ceres-solver-1.14.0 \
&& mkdir build \
&& cd build \
&& cmake .. -DCXX11=ON \
&& make -j6 install \
&& rm -rf /ceres-solver*
注意 Dockerfile 中有需要用到网络的指令,构建镜像时需要联网。之后在工程目录下执行构建镜像的命令:
# --network host 构建镜像时,使用宿主机网络
# -t vins:latest 指定镜像名为 vins:latest
docker build --network host -t vins:latest .
4. 启动容器:启动容器之前先下载 VINS-Fusion 代码和运行时会用到的一个数据集 rosbag 文件:
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Fusion.git
wget http://robotics.ethz.ch/\~asl-datasets/ijrr_euroc_mav_dataset/machine_hall/MH_05_difficult/MH_05_difficult.bag
由于启动容器的命令比较长,因此在工程目录下新建一个 bash 脚本文件 run.sh,在脚本文件内填入运行命令:
#!/bin/bash
xhost +local:docker
docker run -it \
--rm \
--name vins \
--privileged \
--gpus all \
-e DISPLAY=$DISPLAY \
-e QT_X11_NO_MITSHM=1 \
-e NVIDIA_DRIVER_CAPABILITIES=compute,video,utility,graphics \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v VINS-Fusion文件夹代码路径:/root/catkin_ws/src/VINS-Fusion \
-v 数据集rosbag文件路径:/root/test.bag \
vins:latest
xhost -local:docker
注意:高亮的两行需要自己填写自己的 VINS Fusion 和 数据集rosbag文件 的 绝对路径,用于将本地的代码和数据集挂载到容器中使用。
解释一下上面的很多命令和参数的含义:
-i和容器进行交互,-t分配一个伪终端--rm停止容器的同时删除容器--name vins将容器命名为vins--privileged允许容器访问主机当中的设备,例如/dev目录下的相机-e DISPLAY=$DISPLAY、-e QT_X11_NO_MITSHM=1和-v /tmp/.X11-unix:/tmp/.X11-unix容器可以显示程序的图像化界面,参考 ROS Using GUI’s with Docker--gpus all在容器中可以访问所有的GPU-e NVIDIA_DRIVER_CAPABILITIES=compute,video,utility,graphics使用NVIDIA的GPU功能
之后运行 bash run.sh 命令启动并进入容器。
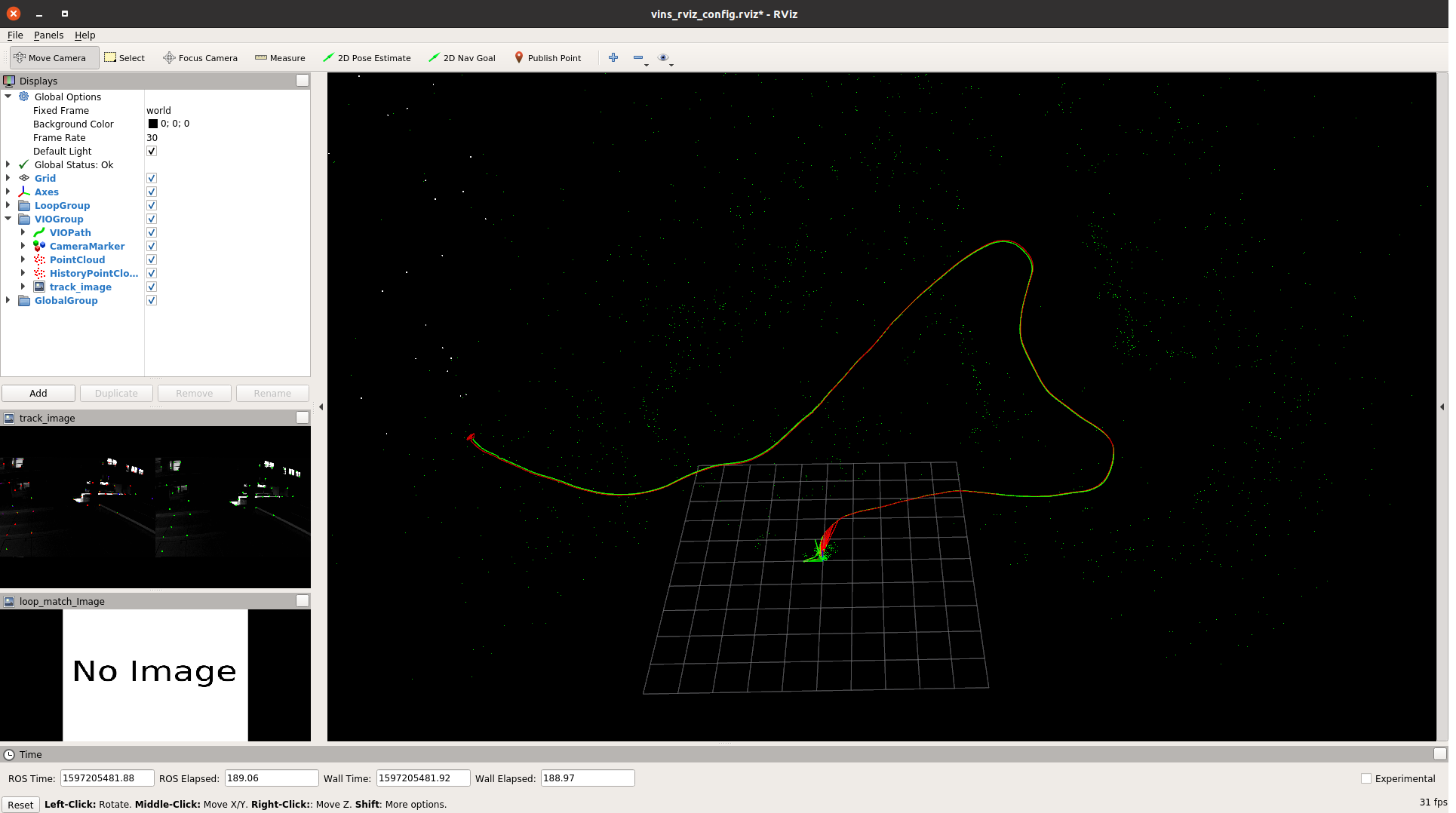
5. 编译并运行VINS
# 下面命令在进入容器的终端中运行
cd /root/catkin_ws/ # 进入 catkin_ws
catkin_make -DCMAKE_EXPORT_COMPILE_COMMANDS=ON # 编译 VINS,-DCMAKE_EXPORT_COMPILE_COMMANDS=ON 用于生成 compile_commands.json 文件
source /root/catkin_ws/devel/setup.bash # 在当前终端 激活 VINS 的 ROS环境
roslaunch vins vins_rviz.launch # 启动 VINS Rviz
# Ctrl + Shift + T 打开一个新终端
docker exec -it vins bash # 进入已经启动的vins容器
source /root/catkin_ws/devel/setup.bash # 在当前终端 激活 VINS 的 ROS环境
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml # 启动 VINS
# Ctrl + Shift + T 打开一个新终端
docker exec -it vins bash # 进入已经启动的vins容器
source /root/catkin_ws/devel/setup.bash # 在当前终端 激活 VINS 的 ROS环境
rosrun loop_fusion loop_fusion_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml # 启动 回环
# Ctrl + Shift + T 打开一个新终端
docker exec -it vins bash # 进入已经启动的vins容器
source /root/catkin_ws/devel/setup.bash # 在当前终端 激活 VINS 的 ROS环境
rosbag play /root/test.bag
6. 利用容器环境开发VINS
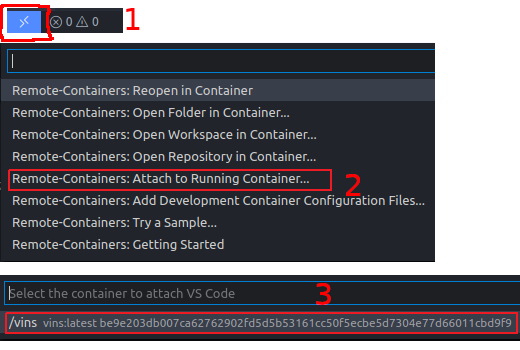
6.1 VsCode 连接已经运行的容器
6.2 在容器中启用插件:在左侧工具栏中选择 扩展(Extensions) 后,选择在容器中启用 C/C++ 和 CMake:

启用插件后,点击 需要重新加载 来重新连接容器,使插件生效。
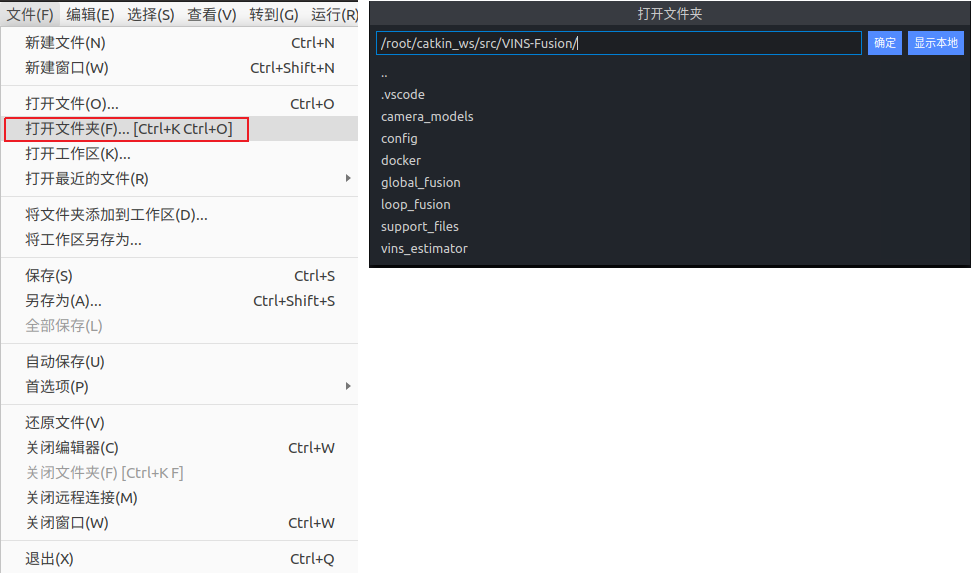
6.3 打开VINS代码文件并配置智能提示:
打开容器内 /root/catkin_ws/src/VINS-Fusion 目录:
之后启动 命令栏(Ctrl + Shift + p),选择命令 C/C++: Edit COnfigurations (JSON),在隐藏目录 .vscode 下生成 C++ 配置文件 c_cpp_properties.json。
在其中添加之前编译生成的 compile_commands.json 文件路径,获得智能提示功能:
{
"configurations": [
{
"name": "Linux",
"includePath": [
"${workspaceFolder}/**"
],
"defines": [],
"compilerPath": "/usr/bin/gcc",
"cStandard": "gnu11",
"cppStandard": "gnu++14",
"intelliSenseMode": "clang-x64",
"compileCommands": "/root/catkin_ws/build/compile_commands.json"
}
],
"version": 4
}
7. 可以开始进行开发了